







CUAV X25 EVO Autopilot Flight Controller - STM32H7, Triple IMU, Dual Baro, RM3100, CAN, 16 PWM, PX4/ArduPilot
-
Detail
Overview
CUAV X25 EVO is a high-reliability core controller for unmanned systems. It combines an STM32H7 (480 MHz, 2 MB Flash) processor with a triple industrial-grade IMU array, dual barometers, and RM3100 magnetometers. A redesigned power architecture supports 10–18 V input and provides up to 5 V/12 A external output to power heavy payloads. The controller integrates dual-path power redundancy, comprehensive ESD/over-current protection, RGB status indication, and a modular CORE/carrier design. It is compatible with ArduPilot and PX4, and suits multirotors, fixed-wing, VTOL, helicopters, UGV/USV/UUV and other platforms.
Key Features
High-performance compute: STM32H7 @ 480 MHz, 2 MB Flash; low CPU usage headroom for advanced algorithms (non-GPS nav, FFT filters, LUA scripts).
Industrial sensor suite:
IMUs: 2× TDK IIM-42653 (±4000 °/s, ±32 g) + 1× TDK IIM-42652 (±2000 °/s, ±16 g).
Magnetometers: PNI RM3100 (anti-interference).
Barometers: TDK ICP20100 & Bosch BMP581 (dual).
Heterogeneous IMU matrix with fault-tolerant switching.
Dual-temperature-compensation system for the IMU: real-time compensation ±0.5 °C; vs. prior generation—15% lower temp drift, 25% better attitude solution consistency.
Vibration isolation: 4th-gen inclined symmetric nylon matrix damping; optional external fixed-ear isolators to suppress abnormal high-frequency vibration and improve data fidelity.
Power architecture: onboard 5 V/15 A high-power DC-DC; external port supports 5 V/12 A output; input range 10–18 V.
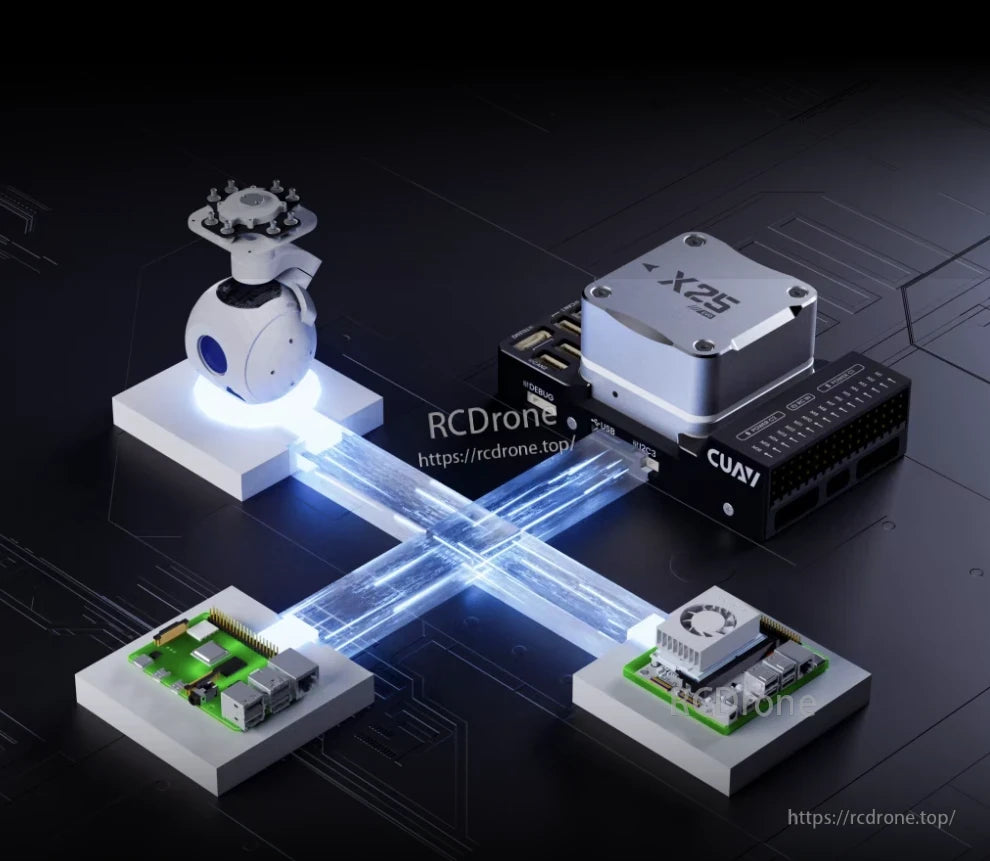
Networking & buses: CAN bus (smart battery/ESC/servos, telemetry feedback) + 100 M Ethernet.
Abundant I/O: up to 16 PWM via servo ports; up to 32 PWM through CAN expansion.
Ruggedization & QA: dual-channel power redundancy, ESD & over-current protection, anti-static connector design, PCB conformal coating, and fully automated testing.
RGB status indicator: multi-color LEDs for arming, power, GNSS/position, fault modes, etc.
Specifications
Category Detail Processor STM32H7 Arm® Cortex®-M7 @ 480 MHz, 2 MB Flash Version X25 EVO IMUs IIM-42653 ×2 (gyro ±4000 °/s; accel ±32 g); IIM-42652 ×1 (gyro ±2000 °/s; accel ±16 g) Magnetometer RM3100 Barometers TDK ICP20100 / Bosch BMP581 (dual) PWM outputs 16 (servo bank M1–M16) Power inputs (CAN) 2 GPS ports 2 TELEM ports 2 UART4 1 RC input 1 (PPM / SBUS / DSM etc.) DEBUG (DSU) 1 Ethernet 1 (100 M) CAN CAN1 ×3, CAN2 ×2 (total 5) SPI6 expansion 1 ADC 1× 3V3, 1× 6V6 USB 1× Type-C I²C 3 RSSI 1 Power module PMU 2 Lite Operating Conditions & Physical
Item Value Input voltage (controller) 10–18 V USB 4.75–5.25 V PMU 2 Lite supply range 20–70 V External 5 V rail up to 12 A output (for peripherals/heavy payloads) Operating temperature −20 °C to +85 °C Dimensions 76.5 × 45.45 × 32.2 mm Weight 110 g Interfaces & Layout Highlights
Dual POWER C1/C2 rails, RC IN, M1–M16 servo bank.
Side connectors for UART/TELEM, ADC, USB-C (debug/IO), I²C, CAN1/CAN2, ETH.
Designed CORE that can be detached for custom carrier board development.
Compatibility & Applications
Firmware: fully compatible with ArduPilot and PX4 (drivers & features).
Vehicles: multirotor, fixed-wing, VTOL, helicopters, UGV, USV, UUV/submersible, and other unmanned platforms.
In the Box (X25 EVO Kit)
X25 EVO flight controller × 1
CAN PMU2 Lite (15 V) power module × 1
CAN expansion board × 1
CAN data cables (35 cm) × 2
USB Type-C cable (100 cm) × 1
TELEM cables (30 cm) × 2
RSSI cable (22 cm) × 1
RC IN cable (30 cm) × 1
CAN PMU2 Lite 15 V smart controller power cable (30 cm) × 1
Details

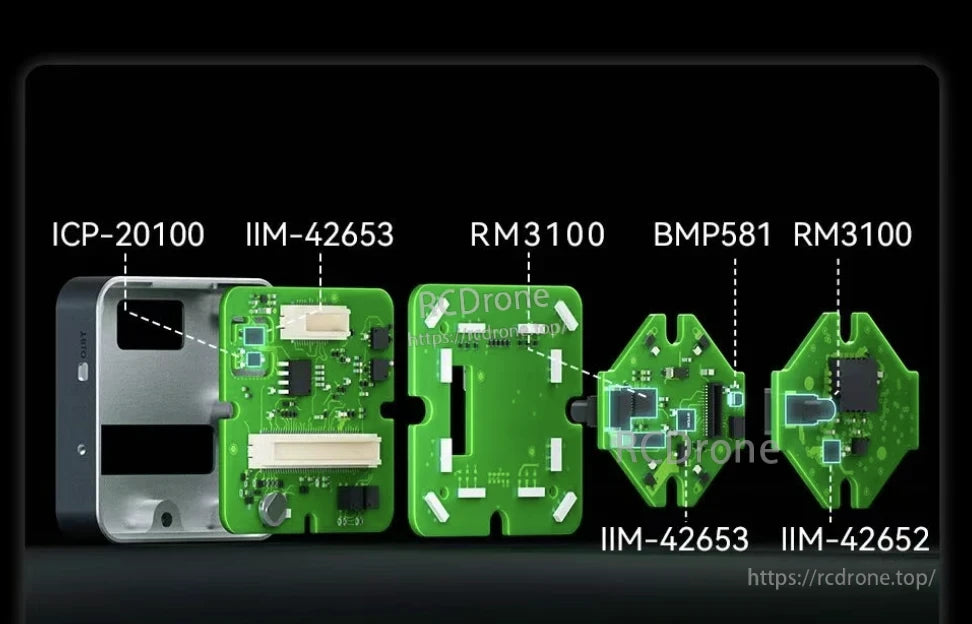
X25 EVO flight controller components labeled with chip models.


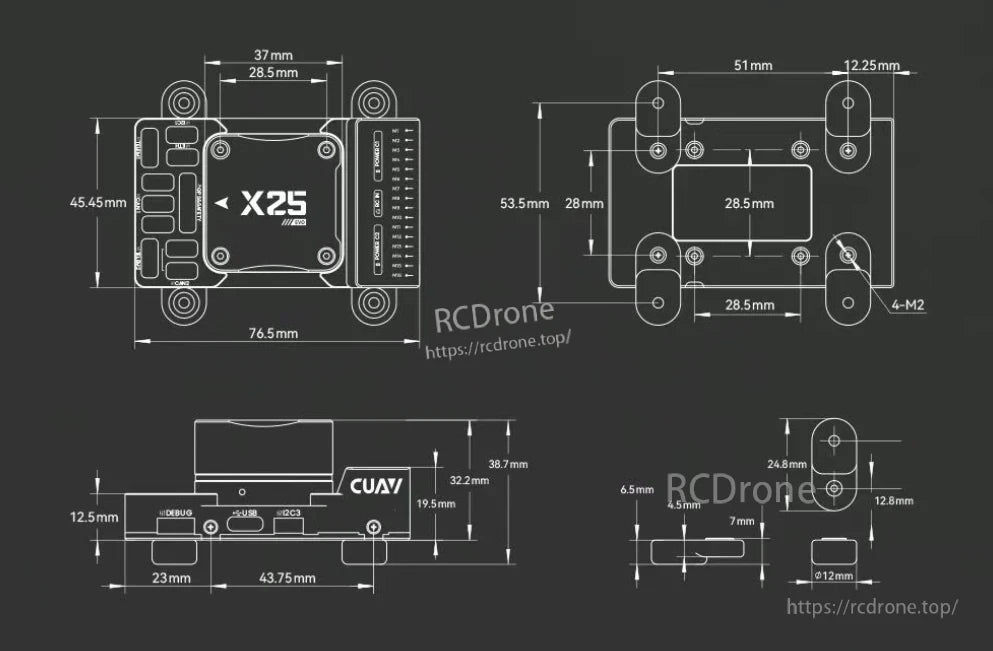
X25 EVO flight controller measures 76.5mm x 45.45mm, features debug, USB, and I2C3 ports, and includes four M2 screws for secure mounting.

X25 EVO includes flight controller, power module, CAN expansion board, data and telemetry cables, Type-C cable, RSSI and RC IN wires, and power supply line.
-
Customer ReviewsNo comments